CAN FD (Flexible Data Rate) Protocol Software
Ready-to-Integrate CAN FD protocol software for ECU Communication






Enabling Faster ECU Communication for Modern Applications
CAN FD (Flexible Data Rate) is an advanced version of the Controller Area Network (CAN) that meets the requirements of modern automotive applications. Flexible data formats have become crucial for enabling various automotive applications such as advanced driver-assistance systems (ADAS), infotainment systems, and electric powertrain control. CAN FD is designed to meet these needs by allowing for higher data rates, longer data frames, and improved error detection and handling.
Embitel’s CAN FD Protocol Software
Embitel’s CAN FD protocol software is a high-performance and reliable solution for automotive applications that require enhanced data transfer rates and longer data frames.
Our CAN FD protocol software is ready to deploy and available under a convenient licensing model.
We have already deployed our CAN FD protocol stack for various customers, providing them with a robust and efficient communication solution that meets their requirements. Our propriety CAN IL tool makes the job of configuring CAN FD protocol for customers’ specific needs, even more convenient.
Whether you need to implement advanced driver-assistance systems, infotainment systems, or electric powertrain control, our CAN FD protocol software provides a flexible and reliable solution that can handle your most demanding automotive applications.
Know more about our CAN FD protocol software business model, features, use-cases, and technical specifications.
Download CAN FD protocol factsheet
CAN FD Protocol Implementation Success Stories
CAN FD Software Stack Integration Project for a Tier-I Supplier
Business Challenge – Our customer (Automotive Tier-I Supplier of vehicle interiors) decided to integrate a ready-to-deploy CAN FD stack solution to ensure that their product development teams focus on the core activities. Additionally, our customer wanted to partner with a technology vendor who can provide support for CAN FD stack integration and maintenance services. Since CAN FD software stack supports up to 64 bytes of data, our customer decided to integrate the same across product lines. Embitel Solution – Our automotive team successfully integrated the following CAN FD software stack layers:
- CAN FD Driver.
- CAN FD Interface Layer.
- CAN FD Network Layer.
The Interface Layer of the CAN FD software protocol stack supports static configuration of Tx and Rx messages. An integration test or sanity test was executed for the end user application after integration of the CAN FD software stack. The CAN FD stack was verified and validated as per the pre-defined test case by ISO 16845 standards. For more details, please refer to the CAN FD integration case study.
CAN FD Protocol Implementation Success Stories
CAN FD Stack License Model
- We offer our industry recognized CAN FD protocol software under a one-time licensing fee model.
- Terms & conditions regarding IP rights and source code ownership are completely transparent and fully aligned with the customer’s requirements and vision.
CAN FD protocol stack use-cases
- Used in Powertrain systems to enable faster and error-free communication between various ECUs.
- Deployed for ADAS systems to enable communication between various sensors, cameras, and control units faster.
- Telematics systems where faster communication is required between the vehicle and external systems such as remote servers, mobile devices, and cloud services.
Pre-tested for stability and reliability
- Unit, Integration and Functional testing of CAN FD protocol software with relevant tools are performed and test reports are shared with the customer.
- Conformance test is performed for the stack as per CAN FD standard.
Technology Guidebook: CAN FD Protocol Software
Learn about the advantages of CAN FD over CAN 2.0 protocol.
Also get details regarding software architecture of the CAN FD protocol solution.
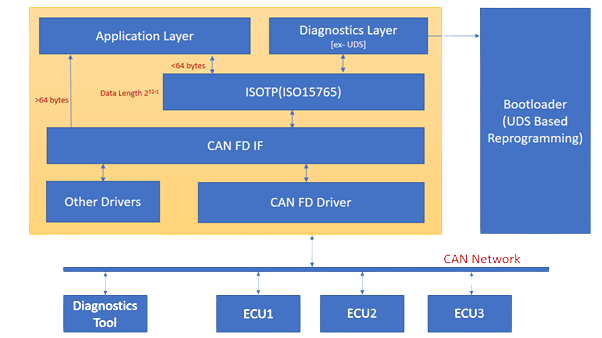
CAN FD BUS Protocol Stack: Details of the Software Architecture
CAN FD interface layer: It sits on top of the physical and data link layers of the CAN FD architecture. CAN FD interface layer is responsible for providing a standardized interface between the CAN FD controller and the application layer.
CAN FD Drivers: CAN FD drivers are responsible for providing an abstraction layer between the hardware and the software, allowing the application layer to communicate with the CAN FD bus without needing to know the details of the underlying hardware.
Configuration, Integration, & Testing Services for Production-Grade CAN FD Protocol Software
The CAN FD drivers or firmware, CAN FD interface layer and network management (NM) layer have been designed, developed and tested according to ISO 11898:-1:2015 standard.
End-user Application Analysis
Detailed analysis of the user application/vehicle application layer to understand the extent of customizations needed for the CAN Network layer

CAN FD Bootloader Services
The CAN FD Bootloader Software development to support automotive ECU re-programming.Testing services for the CAN FD Bootloader as per the ISO standards.
Configuration of CAN Bus Interface Layer (CAN IF)
- DTx and Rx message configuration from the CAN DBC file (CAN Matrix)
- Configuration of CAN Interface layer (CAN IF) through propriety CAN IL tool
200+
customers supported since 2010
100+
scalable and reusable Bootloader platforms delivered
30%
quicker time-to-market enabled
95%
lesser development time with PC-based automation tools
Embitel’s Advantage
Industry-wide Recognition
We have integrated CAN FD stack for several production programs across the globe. The extensive experience gives us an edge in the implementation of ECU communication.
CMMi Level 3 Certified
As a CMMI level 3 certified organization, we have a robust process model in place. This ensures that the CAN FD stack along with other stacks are reliable, bug-free, and efficient.
Configuration & Integration Support
Our CAN FD protocol software is designed to be fully configurable as per project specifications. We provide support for configuration of CAN FD Stack.
Support for After-market Solutions
Development, testing and maintenance support for after-Market products for Telematics, ADAS, remote vehicle diagnostic applications.
Customer FAQs About Integration of CAN FD Protocol Stack in Telematics, Infotainment & Powertrain Applications
Blogs Regarding CAN FD Protocol (ISO 11898-1:2015): Learn more about the CAN FD v/s CAN
- Challenges your Automotive Team may Confront During Migration from CAN 2.0 to CAN FD
- Classical CAN v/s CAN FD: Decoding Their Data Transfer Capabilities and Compatibility with the Bootloader Software
Knowledge bytes
What is CAN FD Protocol?
CAN Flexible Data is a CAN bus protocol that supports a data bit rate of up to 8 Mbps and a payload capacity of 64 bytes. It is an extension to Classical CAN or Classical CAN.
The ported J1939 stack consisted of J1939 Data Link and Transport Layer (J1939\21), Network Management layer (J1939/81), Vehicle Application Layer (J1939/71) and Vehicle Diagnostics Layer (J1939/73)
The role of software in automotive has become quite big and important. These applications need a lot of vehicle’s data and that too in real time. And this where CAN FD excels! Automotive OEMs plan to completely migrate from Classical CAN to CAN FD in the coming years.
CAN vs CAN FD- Why industry felt the for a faster avatar of CAN?
Advanced automotive applications such as Telematics, EV Powertrain Management, Infotainment . require faster and larger data transfers. (Reason – the amount and type of real-time data that these applications deal with. For example, an infotainment system needs to display a gamut of vehicle information- tire pressure, door lock sensor info, transmission system info etc. at real-time).Classic CAN with its maximum data rate of 1 Kbps and a payload capacity of 8 bytes was not the right fit.These constraints paved the way for CAN FD protocol. CAN FD protocol software offers flexible data rates of up to 8 Mbps and a data payload capacity of 64 bytes.
What is a CAN FD Controller and CAN FD Transceiver?
CAN FD controller is a hardware chip/platform that can be added to the host controller as a separate component or can be embedded inside it.
The CAN FD Controller is responsible for converting the messages in accordance with the CAN FD protocol.
The transceiver then transmits the messages over the Controller Area Network (CAN BUS). The CAN transceiver along with some other layers such as Transport Layer (ISO 15765) and Bootloader, together comprise of a CAN Stack.
