
Table of Contents
- What Is Virtual ECU Testing?
- Core Testing Challenges in Software-Defined Vehicles
- Why Virtual ECU Testing Is Critical for Software-Defined Vehicles
- How is a Virtual ECU Developed?
- Levels of Virtual ECU Testing
- Virtual ECU Testing vs MIL, SIL, and HIL Testing
- Virtual ECU Testing and ISO 26262
- Virtual ECU Testing in AUTOSAR Architectures
- Strategic Business Benefits of Virtual ECU Testing
- Virtual ECU Testing in Continuous Integration (Automotive CI/CD)
- The Future of Virtual ECU Testing
Modern vehicles are no longer machines driven purely by mechanical components – they are complex software-driven platforms. With the rise of Software-Defined Vehicles (SDVs), core electric vehicle functions such as powertrain control, ADAS, body electronics, connectivity, and energy management are increasingly governed by software rather than hardware.
As this shift accelerates, virtual ECU testing has become a foundational practice in automotive software development.
What Is Virtual ECU Testing?
Virtual ECU testing is the process of validating an automotive Electronic Control Unit (ECU) in a fully simulated software environment before physical hardware is available.
It enables engineers to test ECU logic, communication, safety behaviour and integration scenarios using a virtualized representation of the ECU running on a PC or cloud platform.
Virtual ECU testing is widely used in:
- Software Defined Vehicle development
- AUTOSAR based architectures
- ISO 26262 functional safety validation
- Continuous integration (CI/CD) pipelines
Core Testing Challenges in Software-Defined Vehicles
As vehicles transition to software-centric architectures, verification and validation become significantly more complex. Testing millions of lines of code across interconnected domains introduces challenges that traditional hardware-first approaches struggle to address.
- Late Hardware Availability
Physical ECUs and vehicle prototypes are often unavailable during early development stages. This delays software validation and pushes integration testing toward later phases, increasing project risk. - High Testing Costs
Hardware-in-the-Loop (HIL) benches, physical ECUs, wiring setups, and vehicle prototypes require substantial investment. Repeated flashing, reconfiguration, and potential hardware damage further increase operational costs. - Limited Real-World Test Coverage
Certain scenarios such as extreme environmental conditions, rare edge cases, or multiple simultaneous failures are difficult, unsafe, or impractical to reproduce physically. This restricts comprehensive validation. - Integration Complexity
Modern vehicles contain dozens to over a hundred ECUs communicating through CAN, LIN, FlexRay, and Automotive Ethernet. Validating signal interactions, network behaviour, and cross-domain dependencies becomes increasingly complicated. - Safety and Fault Validation Constraints
Injecting faults or testing failure modes directly on physical hardware can be destructive and time-consuming. Achieving functional safety compliance under standards like ISO 26262 requires extensive, repeatable fault testing that is difficult to scale using physical setups alone.
These challenges are precisely what drive the need for virtual ECU testing in modern automotive development.
Why Virtual ECU Testing Is Critical for Software-Defined Vehicles
Virtual ECU testing eliminates hardware dependency by enabling early software validation without waiting for physical ECUs, reduces testing costs by minimizing reliance on expensive HIL setups and prototypes, expands test coverage by allowing safe simulation of rare and extreme scenarios, simplifies integration by enabling scalable validation of multi-ECU communication across virtual networks, and supports safe fault validation through repeatable injection of failure scenarios to efficiently meet standards like ISO 26262.
Additional Advantages in SDV Development
Beyond addressing core testing challenges, virtual ECU testing introduces capabilities that are essential for modern Software-Defined Vehicle workflows.
Continuous Integration and Regression Testing
Virtual ECUs can be integrated into CI/CD pipelines, enabling automated regression testing, nightly builds, and continuous validation of software updates. This supports rapid development cycles and aligns automotive software practices with modern DevOps methodologies.
How is a Virtual ECU Developed?
Understanding the development process helps explain why virtual ECU testing is powerful.
Step 1: Collection of ECU Software Components
All relevant elements are gathered:
- Application code (C/C++)
- Model-based code (e.g., Simulink)
- AUTOSAR components
- Configuration files
- Communication descriptions (DBC, ARXML)
Step 2: Removal of Hardware Dependencies
Physical drivers are replaced with simulated drivers.
Hardware-dependent elements replaced include:
- I/O interfaces
- ADC inputs
- PWM outputs
- CAN controllers
- Timers
These are mapped to virtual hardware layers.
Step 3: Compilation for Desktop Environment
Instead of compiling for an embedded microcontroller (e.g., TriCore, ARM Cortex), the software is compiled for:
- x86 processors
- Linux/Windows environments
The result is an executable that behaves like the real ECU software.
Step 4: Integration into Simulation Environment
The compiled vECU is connected to a simulation framework that provides:
- Virtual sensors
- Virtual actuators
- Vehicle dynamics models
- Communication bus simulation
- Environmental scenarios
This allows the virtual ECU to “believe” it is inside a real vehicle.
Step 5: Behaviour Validation and Calibration
Engineers validate:
- Functional output
- Timing behaviour
- Interface consistency
- Network communication
- Fault responses
The vECU is calibrated until it mirrors expected physical ECU behaviour.
Levels of Virtual ECU Testing
Not every testing objective requires full ECU virtualization. There are multiple levels of the virtual ECU testing.
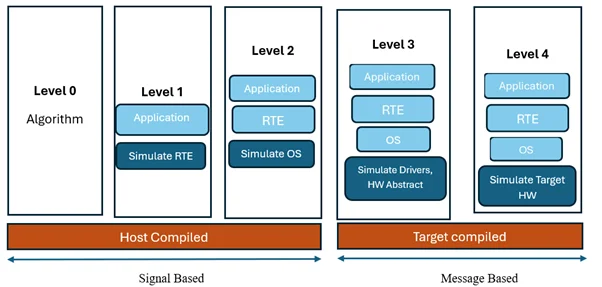
Controller Model vECU (MIL Level) – Best for concept validation.
LEVEL 0
Focus: Algorithm development.
- Pure model-based simulation
- Used in Model-in-the-Loop (MIL)
- No compiled production code
- Early control strategy validation
Level 1
Application-Level vECU – Useful for functional validation and early integration.
Focus: Real application software.
- Runs production application code
- Basic software simulated
- Signal-level communication only
Level 2
Simulated BSW vECU – Ideal for integration and network validation.
Focus: Higher integration fidelity.
- Real application software
- Simulated Base Software (BSW)
- Communication stacks included
- Bus-level testing possible
Level 3
Production BSW vECU – Used for system-level validation.
Focus: Near-real behaviour.
- Full production ECU software
- Virtualized hardware interfaces
- High-fidelity integration testing
Level 4
Target Binary vECU – Used for Virtual HIL scenarios, Safety validation, Complex interaction testing
Focus: Maximum realism.
- Complete production binary
- Accurate timing behaviour
- Virtualized microcontroller behaviour
- Advanced system-level testing
Each level provides increasing fidelity, allowing organizations to choose the right balance between simulation speed and behavioural accuracy.
Virtual ECU Testing vs MIL, SIL, and HIL Testing
Here is a quick look at how virtual ECU testing fits into the broader V-model.
| Testing Type | Runs Real ECU Code? | Hardware Required? | Purpose |
| MIL | No | No | Algorithm validation |
| SIL | Yes (compiled) | No | Software verification |
| vECU | Yes (with virtualization) | No | Integration + system validation |
| HIL | Yes | Yes | Hardware validation |
Virtual ECU testing bridges the gap between SIL and HIL, providing high realism without physical hardware constraints.
Virtual ECU Testing and ISO 26262
Functional safety is one of the most critical aspects of modern automotive development. As vehicles become more software-driven, ensuring compliance with ISO 26262 – the international standard for automotive functional safety becomes increasingly complex.
Traditional hardware-based validation alone is no longer sufficient to guarantee safety in Software-Defined Vehicles. The sheer number of software interactions, edge cases, and fault scenarios makes physical-only validation impractical in terms of cost, time, and scalability.
Virtual ECU testing provides a powerful solution by enabling safety validation in a controlled and repeatable digital environment.
ISO 26262 requires:
- Fault injection testing
- Failure mode testing
- ASIL validation
- Safety mechanism verification
Let’s look at how virtual ECU testing strengthens each of these areas.
Fault Injection
Injecting faults into physical ECUs can be risky and sometimes destructive. In contrast, virtual ECUs allow engineers to simulate:
- Sensor malfunctions
- Communication timeouts
- Corrupted signals
- Voltage irregularities
- Memory faults
These faults can be triggered repeatedly and systematically, ensuring complete coverage of safety mechanisms without damaging hardware.
Failure Mode Testing
ISO 26262 requires validation of failure behaviour under abnormal conditions. Virtual ECU testing allows engineers to explore rare or dangerous scenarios that would be difficult or unsafe to recreate in real vehicles.
Examples include:
- Simultaneous multi-sensor failure
- High-speed system faults
- Environmental extremes
- Network overload conditions
Because these scenarios are simulated, they can be repeated precisely, ensuring consistent validation results.
ASIL Validation
Automotive Safety Integrity Levels (ASIL A to D) demand increasing levels of rigor. For higher ASIL systems such as braking, steering, and ADAS, validation complexity increases exponentially.
Virtual ECU testing enables:
- Systematic test automation
- Traceability of safety requirements
- Regression validation after software updates
- Coverage analysis across multiple safety goals
This significantly accelerates ASIL compliance efforts.
Safety Mechanism Verification
Modern ECUs implement safety mechanisms such as watchdogs, redundancy logic, plausibility checks, and fallback strategies.
With virtual ECU testing, these mechanisms can be validated early in development, ensuring:
- Correct fault detection timing
- Proper fallback activation
- Safe state transitions
- Communication of diagnostic trouble codes
By shifting safety validation earlier in the lifecycle, virtual ECUs reduce costly redesign loops later in development.
Virtual ECU Testing in AUTOSAR Architectures
Most contemporary automotive ECUs are built using AUTOSAR architecture, which separates application software from hardware-dependent components.
While AUTOSAR improves modularity and scalability, it also introduces complexity due to layered architecture:
- Application Software (ASW)
- Runtime Environment (RTE)
- Base Software (BSW)
- Microcontroller Abstraction Layer (MCAL)
Virtual ECU testing plays a crucial role in validating these layers without physical hardware.
It supports:
- AUTOSAR Application Software (ASW) validation
- Basic Software simulation
- RTE behaviour testing
- Communication stack validation
- ECU extract testing
By simulating the AUTOSAR stack, engineers can verify:
- Correct signal routing
- Service communication behaviour
- Diagnostic communication flows
- Network management handling
This ensures integration issues are identified long before physical ECU deployment.
Strategic Business Benefits of Virtual ECU Testing
Beyond technical advantages, virtual ECU testing delivers measurable business impact across automotive development programs. In Software-Defined Vehicle environments, the ability to validate software independently of hardware transforms not only engineering workflows but also program execution strategy.
Reduced Program Risk
In traditional development cycles, integration and system-level issues often surface late, when hardware is already frozen. This leads to costly redesign loops, delayed validation cycles, and program uncertainty.
Virtual ECU testing shifts validation earlier in the lifecycle. By identifying integration mismatches, communication failures, and safety logic gaps early, organizations significantly reduce late-stage surprises and technical risk.
For large SDV programs involving multiple domains, this early risk mitigation is critical to maintaining schedule stability.
Accelerated SOP (Start of Production) Timelines
Time-to-market pressure in modern automotive programs is intense, especially with frequent software feature updates and OTA strategies.
Because virtual ECUs allow –
- Parallel hardware and software development,
- Continuous integration validation,
- Early system-level testing,
- overall development timelines are compressed.
Teams no longer wait for physical ECUs to begin integration testing, enabling faster readiness for production release.
Improved Release Confidence
As vehicles become more software-driven, release quality directly impacts brand reputation and safety compliance.
vECU testing enables:
- Large-scale automated regression validation
- Repeatable fault injection scenarios
- Continuous verification across software versions
This increases confidence that production releases meet functional, safety, and integration requirements before hardware deployment.
For high ASIL systems, this structured validation approach is especially valuable.
Enhanced Cross-Team Collaboration
Modern SDV architectures involve distributed teams working across:
- Powertrain
- ADAS
- Body electronics
- Connectivity
- Cloud integration
Virtual ECU environments provide a shared digital validation platform where teams can integrate and test components without physical lab dependencies.
This improves:
- Cross-domain integration efficiency
- Remote collaboration
- Parallel development workflows
- Vendor/OEM coordination
Such collaboration scalability is increasingly important in global automotive programs.
Greater Hardware Flexibility and Platform Scalability
As automotive architectures shift toward centralized computing and zonal controllers, software must remain portable across hardware variants.
Virtual ECU testing decouples software validation from specific microcontrollers, enabling:
- Platform migration assessment
- Hardware abstraction validation
- Software reuse across vehicle lines
This flexibility supports long-term platform strategy and multi-vehicle program scalability.
Stronger Compliance and Audit Readiness
With increasing regulatory focus on functional safety and software validation under standards like ISO 26262, documentation and traceability are essential.
Virtual ECU testing supports:
- Automated test documentation
- Safety requirement traceability
- Repeatable validation workflows
- Audit-ready validation evidence
This improves compliance readiness and reduces certification friction.
Virtual ECU Testing in Continuous Integration (Automotive CI/CD)
The automotive industry is steadily adopting DevOps and continuous integration practices similar to those used in enterprise software development.
However, embedded automotive software traditionally depended on hardware availability, limiting automation.
Virtual ECUs remove this constraint.
They enable:
- Automated build verification
- Continuous regression testing
- Nightly integration testing
- Software version benchmarking
- Distributed team collaboration
By integrating virtual ECUs into CI/CD pipelines, automotive teams can:
- Detect integration failures immediately
- Validate feature updates quickly
- Support over-the-air (OTA) software strategies
- Maintain consistent quality across frequent releases
This is essential for Software-Defined Vehicles, where software updates may occur throughout the vehicle’s lifetime.
The Future of Virtual ECU Testing
As automotive architectures shift toward –
- Centralized computing systems,
- Zonal controllers,
- High-performance computer platforms,
- AI-driven driver assistance systems,
- the role of virtual ECU testing is expected to expand beyond individual ECU validation.
Future trends include:
- Full virtual vehicle ecosystems
- Cloud-based large-scale simulation
- AI-assisted test case generation
- Digital twin validation frameworks
- Real-time co-simulation environments
In advanced development environments, entire vehicle networks may be validated virtually before a single physical prototype is built.
Virtual ECU testing is evolving from a supportive tool into a foundational pillar of automotive software engineering.
