The automotive industry is on the cusp of a revolutionary transformation. And it is aided by extensive research and investments directed towards safety technologies.
Among various other technologies, Advanced Driver Assistance System (ADAS) is at the forefront of this endeavor, enabling road vehicles to become more intelligent and safer. In essence, ADAS technology helps vehicles detect and prevent potential accidents while assisting drivers in changing lanes efficiently and executing precise turns.
The ultimate goal of this pursuit is the realization of autonomous vehicles, where cars can operate without human intervention.
If we consider completely autonomous driving as Level 5, we are currently at Level 2, i.e., partial driving automation. Level 3, which is conditional driving automation, is still in the testing phase.
Building an ADAS system pertaining to any level, entails the highest safety criticality i.e., ASIL D. And therefore, the most stringent ISO 26262 standard guidelines need to be followed.
But before we delve into the functional safety aspect of ADAS, let’s first give you a quick overview of ADAS and how it paves the way for autonomous vehicles.
ADAS, the Road to Autonomous Vehicles
ADAS has seen a significant evolution over the years, growing from rudimentary systems to complex networks of sensors, actuators, and control units. Starting with basic features like anti-lock braking systems and electronic stability control, ADAS has expanded to include lane keeping assist, adaptive cruise control, automatic emergency braking, traffic sign recognition, and more.
Each ADAS feature represents a building block in the journey towards fully autonomous vehicles. For instance, adaptive cruise control and lane keeping assist combine to form the basis for highway autopilot systems.
Similarly, parking assistance systems have evolved into fully automatic parking features. These incremental steps are crucial in testing and validating the safety and reliability of autonomous technologies.
The significant investments and efforts by various automotive companies have accelerated the development of autonomous vehicles. The continuous progress in technology and the ever-growing interest in self-driving cars may soon bring these vehicles to our roads.
The potential benefits of autonomous vehicles include improved road safety, reduced traffic congestion, and enhanced mobility for people with disabilities. However, the introduction of autonomous vehicles also brings new challenges related to vehicle and road safety.
The ultimate goal of ADAS is to achieve Autonomous driving. Therefore, we must understand how ISO 26262 standard can help make such vehicles safer.
ISO 26262 Standard as a Guideline for Autonomous Vehicles
Since there is no specific standard for the functional safety of autonomous vehicles, researchers have attempted to utilize ISO 26262 as a guiding framework. By adapting the principles from ISO 26262, they aim to develop software and hardware models that make autonomous vehicles compatible with functional safety standards.
Although this approach serves as a starting point, it also highlights the need for a new and comprehensive standard, tailored specifically for the unique challenges of autonomous driving.

Architecture-Based Approaches for Functional Safety in ADAS
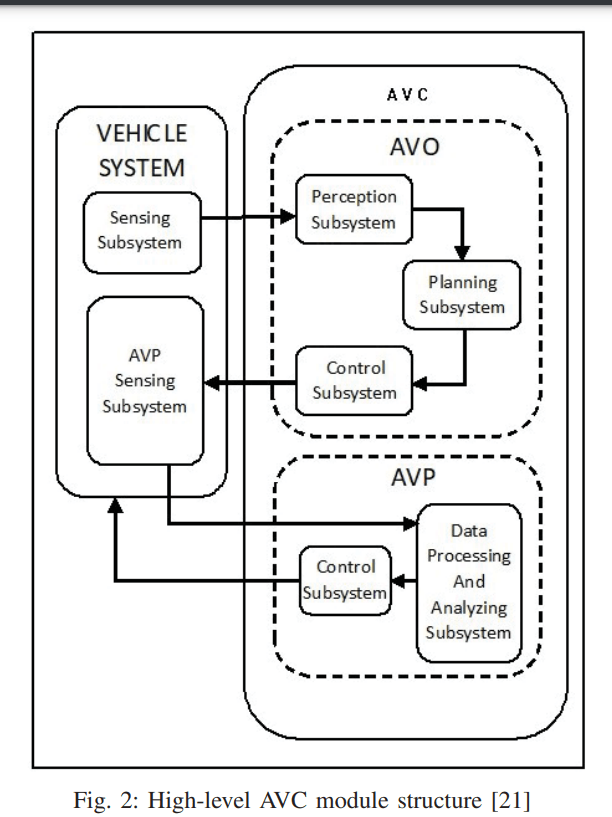
Several architecture-based approaches have been proposed to ensure functional safety in autonomous and semi-autonomous vehicles. One such strategy is the Autonomous Vehicle Control (AVC) module, inspired by the Automatic Train Control (ATC) system used in railways.
The AVC module divides the vehicle’s architecture into subsystems, with the AVP and AVO modules being responsible for autonomous vehicle protection and safety, respectively.
Another approach focuses on designing a safe and secure autopilot system. Drawing lessons from the aviation industry, which has employed autopilot features for over six decades, researchers analyze accidents caused by human factors when the autopilot system malfunctions. By applying a modular functional architecture and incorporating security measures, the proposed approach aims to stabilize the autopilot system in urban environments.
An integrated approach for addressing both functional safety and cybersecurity is also being explored. As smart Electric and Electronic (E/E) systems become more prevalent and autonomous, they face cybersecurity threats alongside safety risks. The integrated model combines functional safety and cybersecurity standards to ensure both safety and security in intelligent systems, including autonomous vehicles.
Limitations of Current Functional Safety Standards (ISO 26262) in ADAS Context
While ISO 26262 and IEC 61508 are valuable functional safety standards for road vehicles, they have limitations when applied to autonomous vehicles. These standards judge the safety of a system based on the presence or absence of unreasonable risks, leaving room for human error in judgment. They often overlook minor, tolerable risks, and as a result, do not promise absolute safety.
Other ethical considerations include laws, regulations, policies, evolution, innovation, and sustainability. Addressing these issues is paramount. Given the current advances in autonomous systems, the urgency to tackle these problems has only increased. Therefore, existing standards may not suffice, indicating an opportunity for future exploration and enhancement in this domain.
To address these ethical issues and risk-related fallacies, new standards focused on the safety and security of autonomous vehicles are urgently needed.
Future Research and Conclusion
The evolution of autonomous vehicles presents a compelling area of future research. One such study aims to develop a software model for ensuring functional safety in an All-Terrain Vehicle (ATV). Additionally, the integration of functional safety mechanisms into the in-vehicle communication module of an autonomous vehicle is being explored to ensure compliance with ISO 26262 standards.
The pursuit of autonomous vehicles has revolutionized the automotive industry, prompting substantial investments and extensive research in safety technologies. As these vehicles move from concept to reality, addressing functional safety becomes paramount.
Existing standards like ISO 26262 lay the foundation, but dedicated standards for autonomous vehicles and considerations of ethical issues are necessary to ensure a safe and secure future on the roads.
By implementing architecture-based approaches and addressing the limitations of current standards, we can pave the way for a safer and more efficient transportation landscape. Only then can we truly embrace the transformative potential of autonomous vehicles, ensuring a safe and smooth ride for all.
